
Forum Replies Created
-
AuthorPosts
-
Back Kevin
Participanthi i cant find my old controller, how work it , is it voltage regulation or PWM.
i remember me i can only drive on train on this track, is this right .Participantalso kein strom kein move!
ich schalte den OE pin mach 300ms auf false.
so kann sich nichts mehr bewegen, es gibt verschiedene gründe warum die servos zucken.– die arduino lib (da kann man leider nichts machen)
– die kabel , kabel können als antenne fungieren das kann man beheben wenn man lange servo kabel durch abgeschiermtes kabel ersetzt mit grösserem draht querschnitt.
– Power , zu kleines netzteil = grosse probleme, also am PCA können 16 servos angeschlossen werden . ich benutze einen DC/DC bug auf meinen boards der 5A bei 5V liefern kann ich habe 2 * PCA also 32 servos . Das ergibt 5A/32 servos = 150ma pro servo .
aber ihr steuert ja nie alle 32 gleichzeitig oder?bei meinen boards bin ich immer davon ausgegangen dass dass max 10 servos gleichzeitig laufen (500ma pro servo) aber in der regel steuert ihr weniger gleichzeitig an.
ich würde aber immer minimum 5A einsetzen.
PS: die rechnung ist nicht ganz richtig da alle servos 10-30ma leerlaufstrom haben beim einschalten des OE PIN. Aber ein grober richtwert. halteströme bei servos können zwischen 10-20 mal grösser als leerlaufströme sein.(gegen anschlag fahren)
absolutes nogo für die verlegung

-
This reply was modified 5 years, 3 months ago by
Participantteste das mal mit dem papierstreifen
ich habe meine werte so angepasst dass die servos fast auf anschlag fahren das, papier lässt sich noch ganz leit entfernen,man spürt aber die reibung zwischen arm und anschlag.ino muss nur angepasst werden fals deine ermittelten werte ausserhalb min max der ino sind
-
This reply was modified 5 years, 3 months ago by
-
This reply was modified 5 years, 3 months ago by
Participantwenn ihr die servos nicht killen wollt testet folgendes:
nehmt mal ein streifen papier steckt den streifen ins gehäuse ,dann servo schalten lassen,
falls das papier jetzt duch den servo arm eingeklemmt ist ,habt ihr ein problem mit den werten.
testet es für beide seiten mal.
falls die servos jedes mal auf anschlag fahren und unter spannung bleiben verbrennen sie
ich nehme mal an du benutzt die pins des controllers und nicht den PCA, beim pca gibt es den vorteil mit dem OE pin zum abschalten des PCAs nach x sekunden.ich musste auch die werte bei mir anpassen.
einmal in der mazzo ino und auch die in racrail unter parameter.es hat auch nichts mit billig oder nicht zu tun,ein 300 euro servo verbrennt auch wenn man ihn jedes mal gegen anschlag fährt. die servos laufen heiss
ich habe mehrere hexapods schon gebaut, da ist mir noch kein servo verreckt ,wenn man sie richtig behandelt.
ich wollte meine trixbrix servos nicht aufbrechen aber ich glaube es sind in den letzten serien andere servos verbaut, denn die werte stimmen nicht mehr ganz.
welche werte hast du in rocrail eingestellt
Participantleider sind mir ein par bauteile ausgegangen.
warte jetzt auf lieferungen, habe dir auch ein paket vorbereitet mit je einer platine von jeder art.
sobalt ich zu post gehen kann schicke ich dir das.Participantich teste gerade noch eine mini laser lösung zum räder zählen, leider funzt diese lösung nur mit sender und empfänger
Participant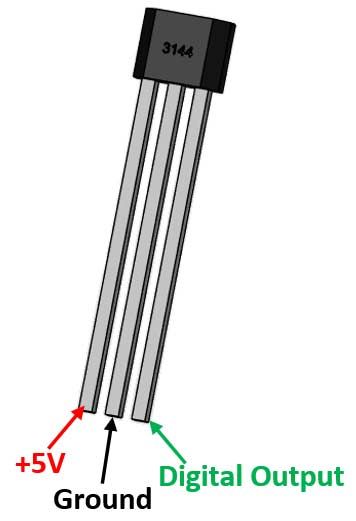
beim hall sensor a3144 bin ich beim test auf +- 3cm
Participantkleine info die reed kontakte müssen richtig gedreht sein ,dann geht es besser.
bei den glas kontakten sieht man ja das innenleben , es sind einfach 2 metalplatten die vom magneten angezogen werden .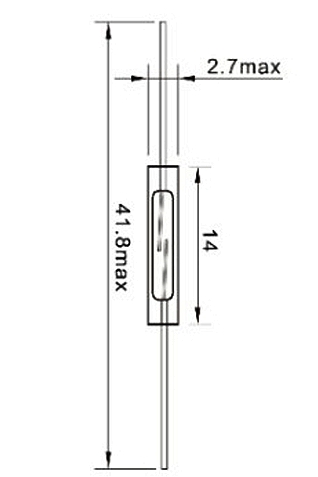
sind die platten falsch ausgerichtet so werden sie gar nicht oder nur durch sehr starke magnet ausgelöst.
test weise kannst du es mal mit einem hall sensor versuchen ,bei denen gibt es auch eine richtung die zu beachten ist.die richtung der Magnet spielt auch eine rolle .
als test kann man ein weises blatt papier über den magneten legen und mit eisenstaub bestreuen um das magnetfeld sichtbar zu machen .manch magneten strahlen an den polen mehr als an den seiten .
ParticipantDie neusten boards sind heute angekommen ,habe mal schnell was gelötet.
so kann ich wenigstens neue Fotos posten auf den github.
Neue MCP23017 boards L9110 board ist noch in der entwicklung.ich versuche schnellst möglich noch h-files zu schreiben für den einsatz im Layoutcontroller.
Participant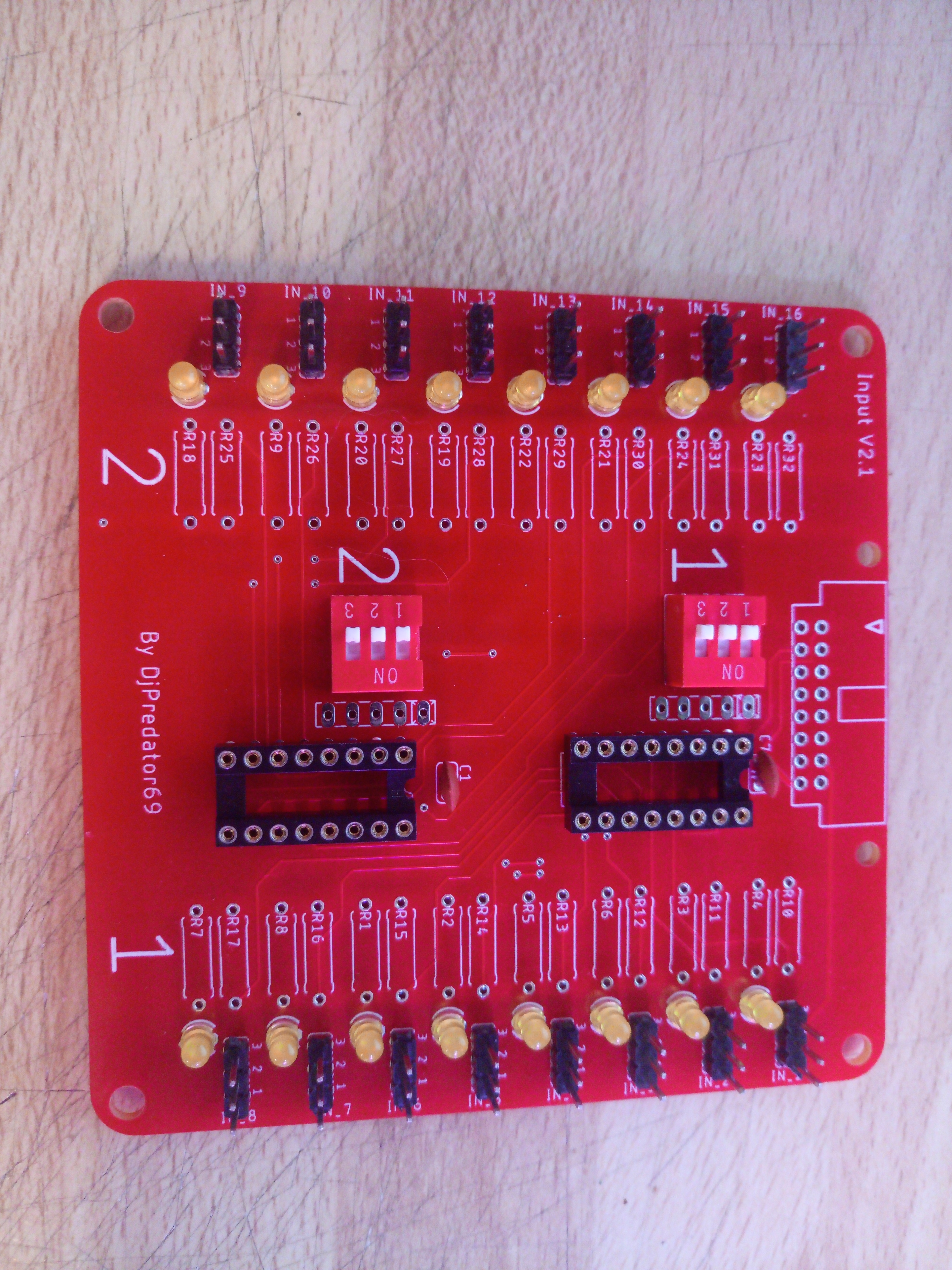
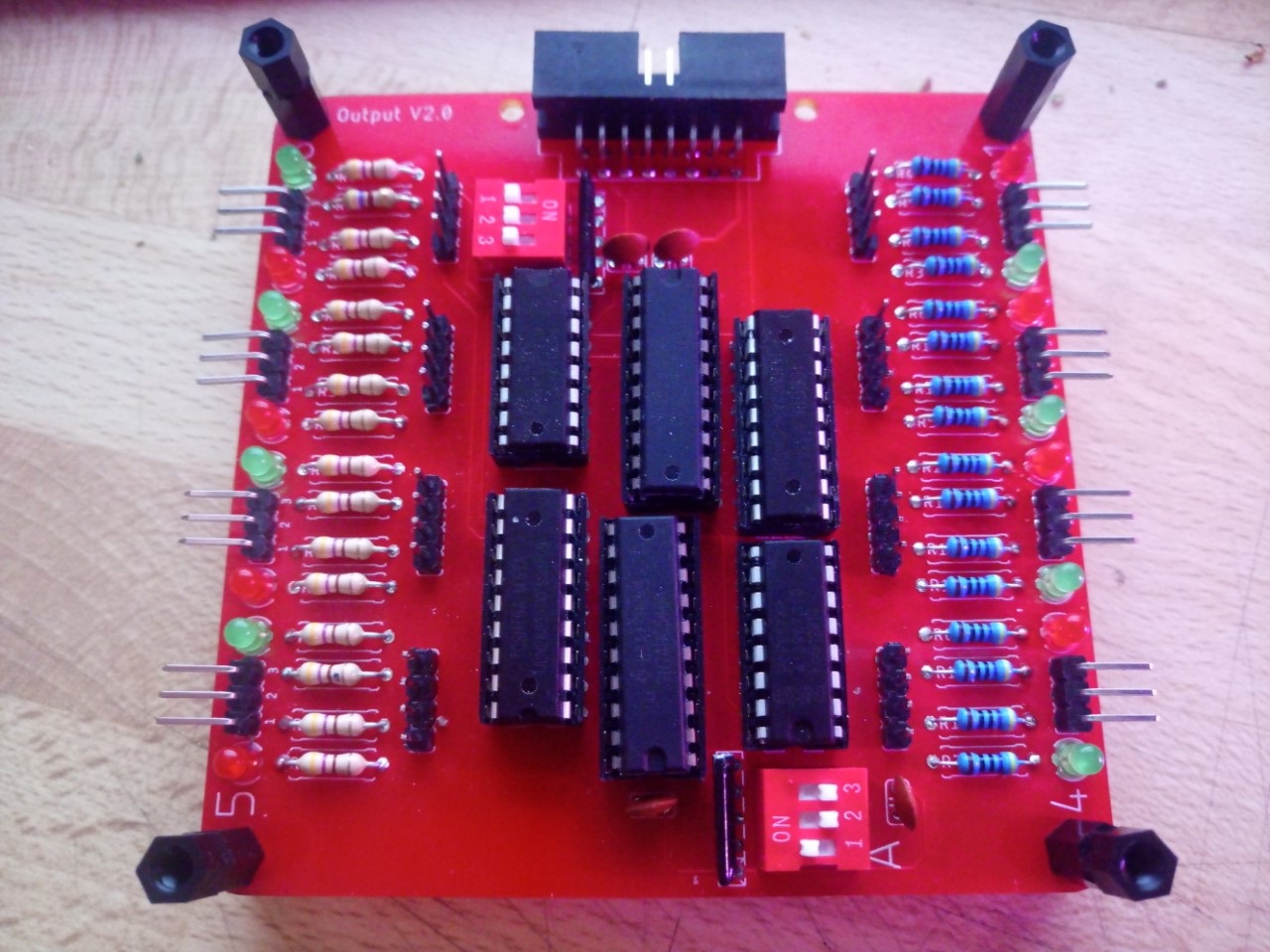
habe das neue CPU und OUTPUT board getestet und alles klappt.
Github habe ich auch upgedatet .
arduino ino auf dem github für out und inputs laufen, nur das neue input board hatte noch eine macke habe die auch behoben.
das input board sollte ab V2.1 fehlerfrei laufen.am Output board können 8 trixbrix Signallampen installiert und gesteuert werden.
am Input board können 16 trixbrix Trainsensoren oder auch andere kontackte angeschlossen werden die über masse schalten.
an der CPU wurden nur die pinlöcher den bauteilen angepasst.IN und OUTPUT boards haben 2 dipschalter zum adressieren der chips.
Es kann also 4 mal das gleiche board gebaut werden und ein CPU board für den maximalen ausbau.als chip wird der PCF8574P verwendet (nur diese adressen sind in der ino hinterlegt)
-
This reply was modified 5 years, 3 months ago by
-
AuthorPosts